ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ開発へ向けて- (設計技術シリーズ88)
(税込) 送料込み
商品の説明
商品説明
商品コード:【4904774914】
| 商品名 | 【中古】 ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ開発へ向けて- (設計技術シリーズ88) |
|---|---|
| 商品コード | 4904774914 |
| 商品説明 |
|
| スペック | |
| 注意事項 |

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ開発へ向けて- (設計技術シリーズ88)

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ
ロボット用触覚センサの設計法 実用ロボット・VR・触覚ディスプレイ

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ
ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ
ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ
ロボット用触覚センサの設計法 実用ロボット・VR・触覚ディスプレイ

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ開発へ向けて- (設計技術シリーズ88)

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ
大阪販売 【中古】 ロボット用触覚センサの設計法-実用ロボット・VR
大阪販売 【中古】 ロボット用触覚センサの設計法-実用ロボット・VR

触覚認識メカニズムと応用技術-触覚センサ・触覚ディスプレイ-【増補版】
大阪販売 【中古】 ロボット用触覚センサの設計法-実用ロボット・VR

ロボット用触覚センサの設計法ー実用ロボット・VR・触覚ディスプレイ

ロボット用触覚センサの設計法ー実用ロボット・VR・触覚ディスプレイ
大阪販売 【中古】 ロボット用触覚センサの設計法-実用ロボット・VR
ロボット用触覚センサの設計法ー実用ロボット・VR・触覚ディスプレイ

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ
株式会社 FingerVision|触覚センサ

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ

ロボ向け触覚センサー、軟らかい物扱いやすく 産総研 - 日本経済新聞

ロボット用触覚センサの設計法 実用ロボット・VR・触覚ディスプレイ
ロボット用触覚センサの設計法ー実用ロボット・VR・触覚ディスプレイ

最愛 大人の科学 学研 自然科学と技術 - aval.ec
ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ

ロボット用触覚センサ Smart Finger|日本バイナリー株式会社

大放出セール】 【中古】 (設計技術シリーズ88) ロボット用触覚センサ
フィルム型触覚センサー |ロボット開発に | NISSHA
大放出セール】 【中古】 (設計技術シリーズ88) ロボット用触覚センサ

株式会社 FingerVision|触覚センサ

ロボット用触覚センサの設計法-実用ロボット・VR・触覚ディスプレイ

光学式触覚センサ(α版)を限定100個、販売開始|株式会社FingerVisionの

超熱 【中古】 光波・原子 “大学物理”への扉をひらく (SEGハイレベル
ロボットの進化に必須! 触覚センサーの種類と原理を解説|NISSHA
ピーバンドットコム、触覚センサ導入サービスを開始! | 株式会社ピー
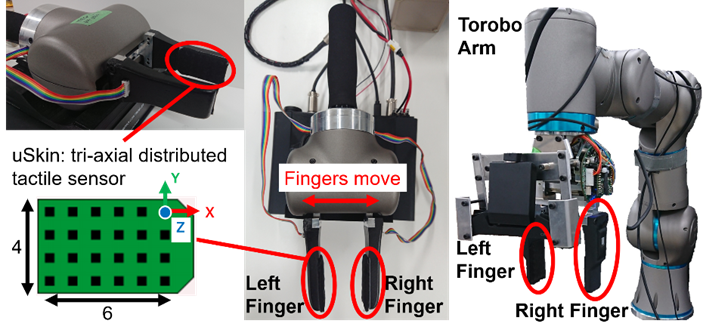
触覚センサアレイを用いた物体の変形・滑り検知 – 東京ロボティクス
正式的 【中古】 (実践土壌学シリーズ) 土壌微生物学 自然科学と技術

遠隔手術ロボットに触覚VR | 日経クロステック(xTECH)

株式会社 FingerVision|触覚センサ
商品の情報
メルカリ安心への取り組み
お金は事務局に支払われ、評価後に振り込まれます
出品者
スピード発送
この出品者は平均24時間以内に発送しています














